The Endoscopic Hand Tool is a surgical tool designed to reduce the symptoms that sinus cavity surgeons face during long days of work in their profession.
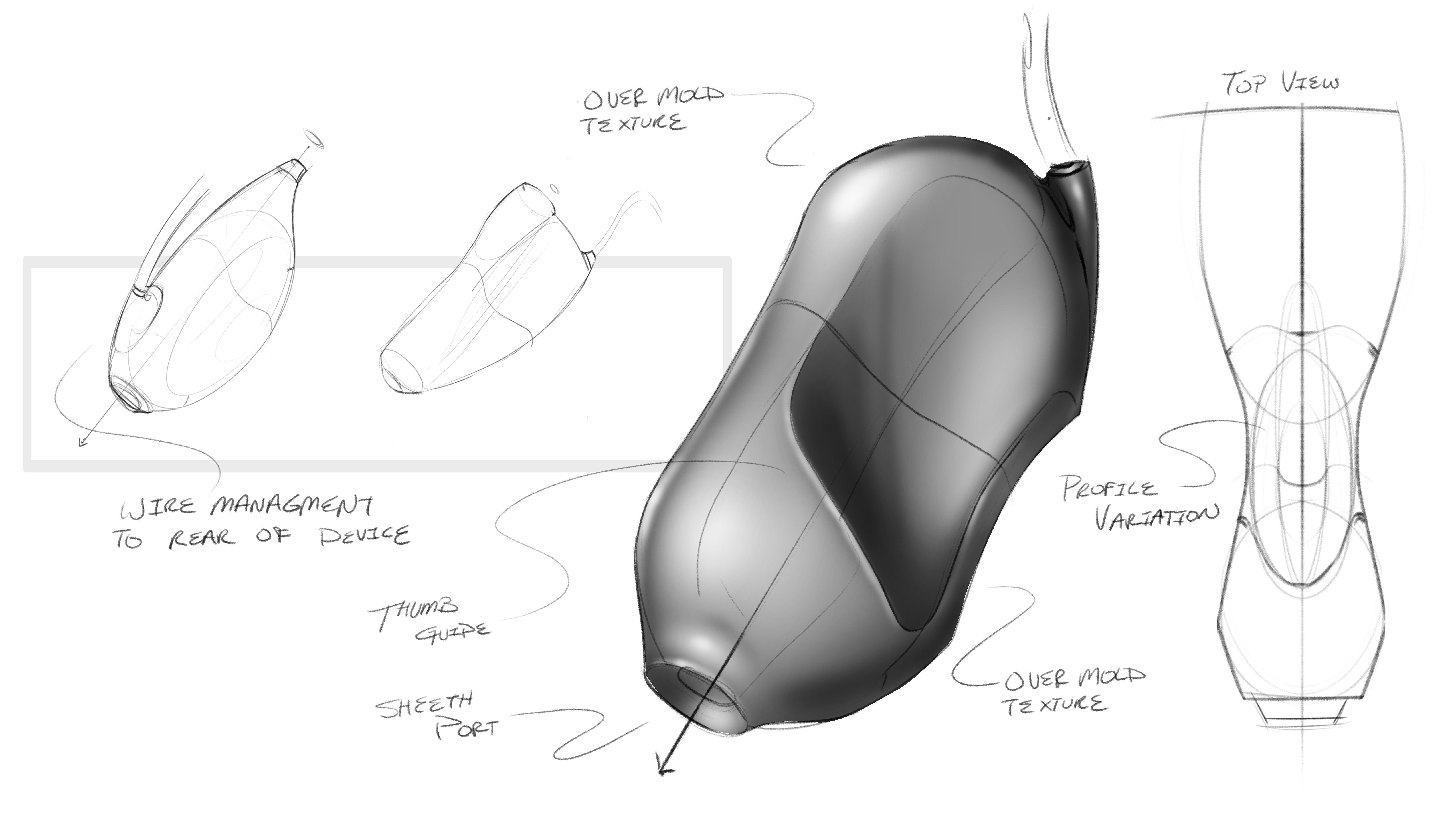
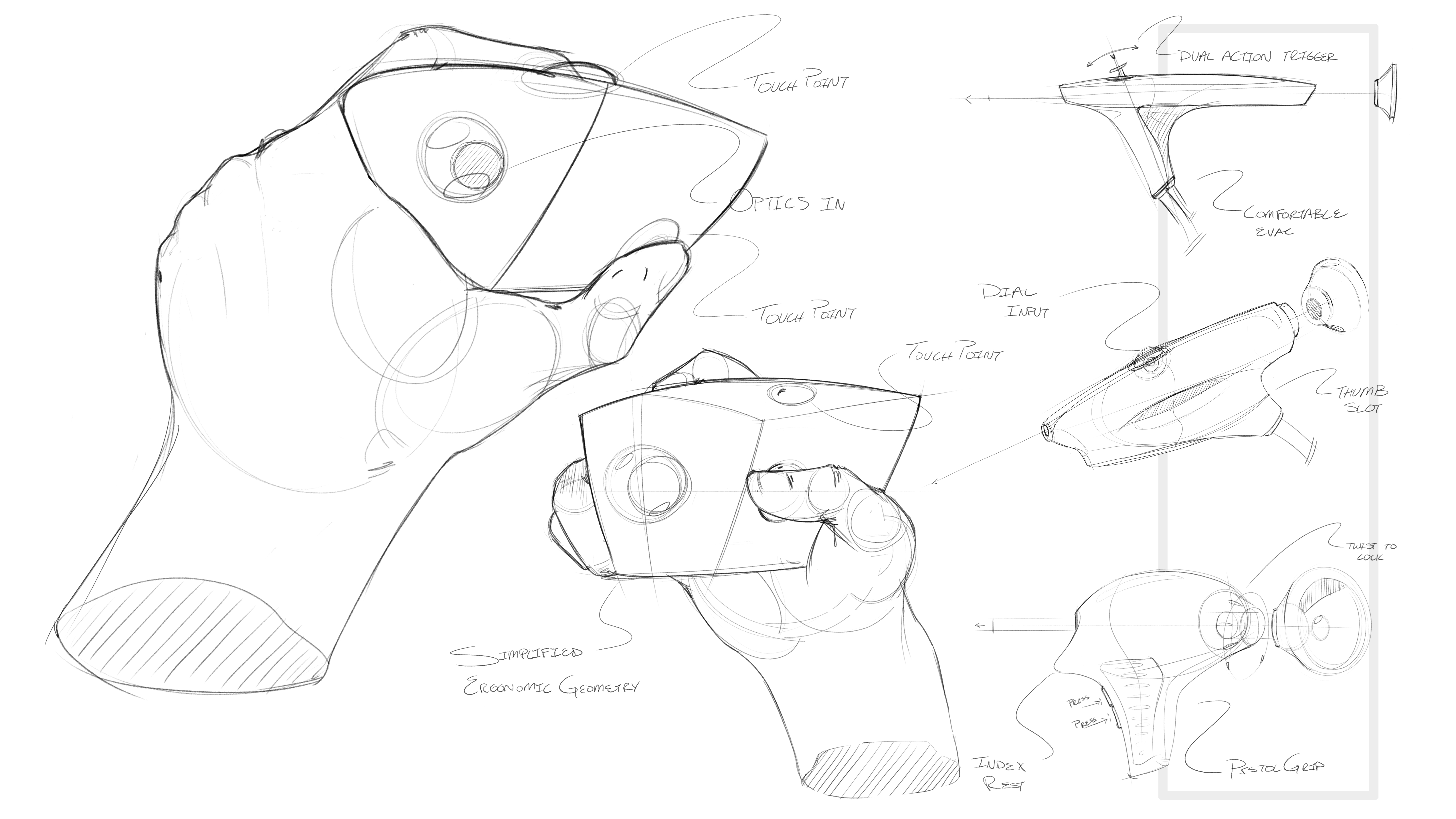
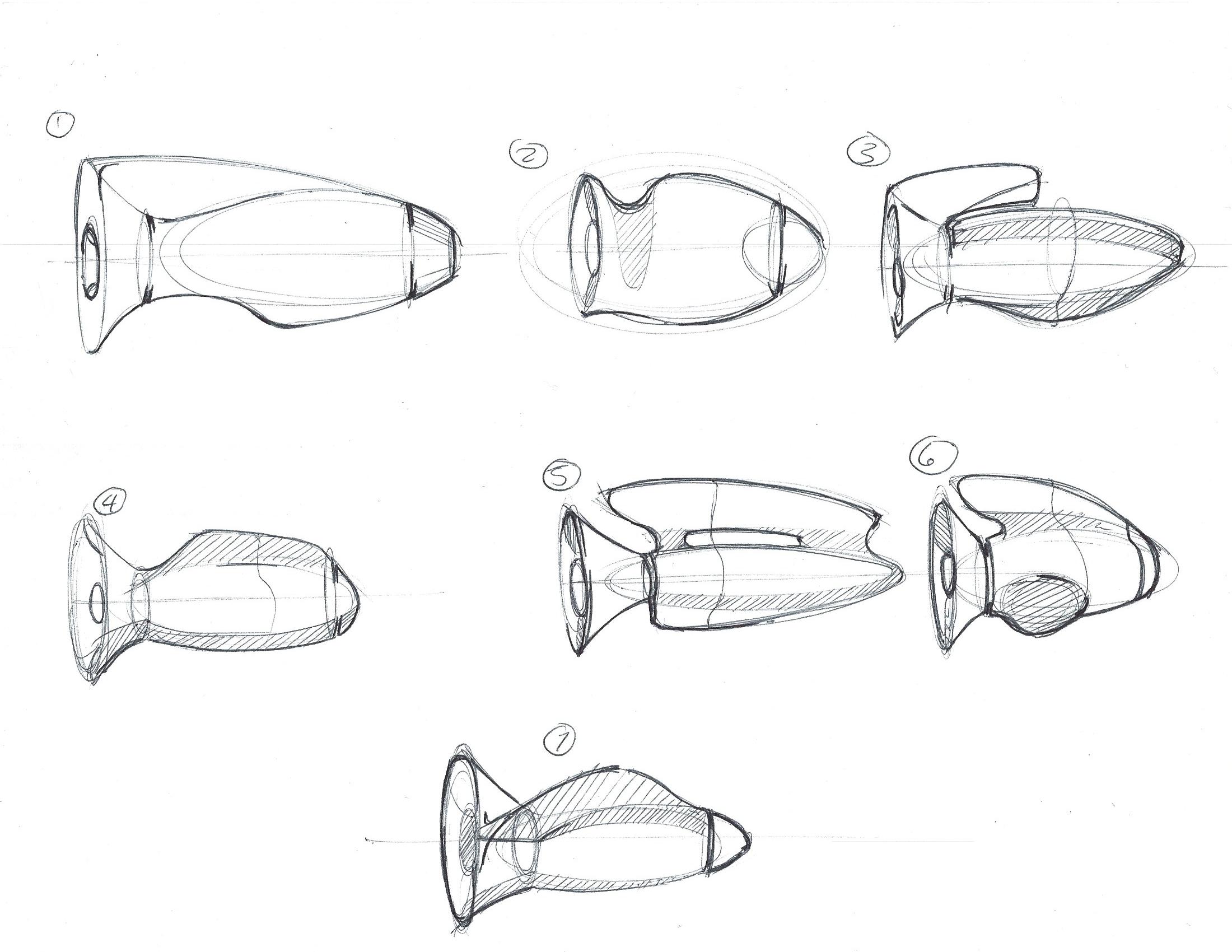
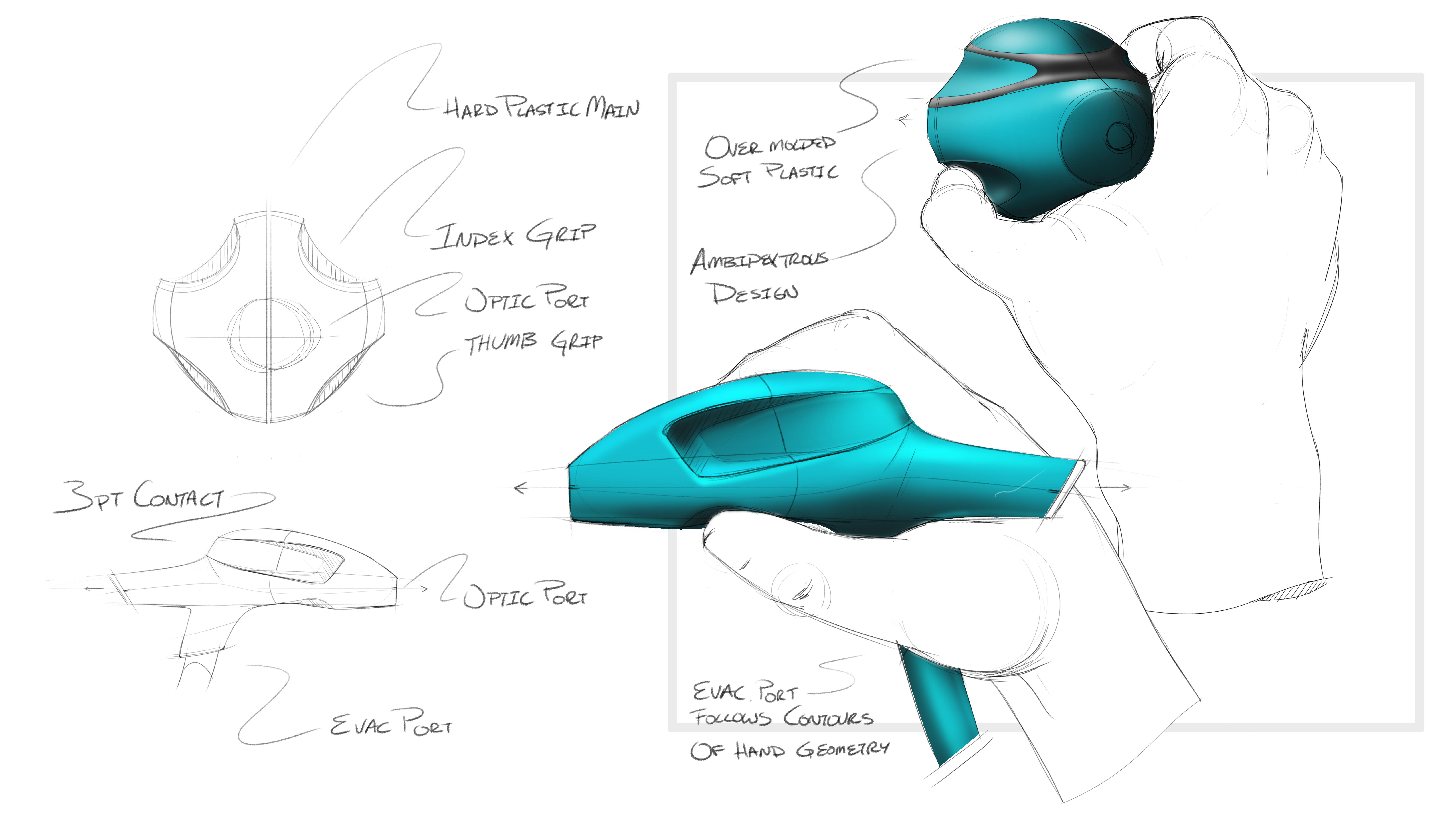
Since carpal tunnel is the leading cause of discomfort for doctors, an adjustment to hand orientation was necessary. These studies explore potential grip styles that would address wrist and hand strain.
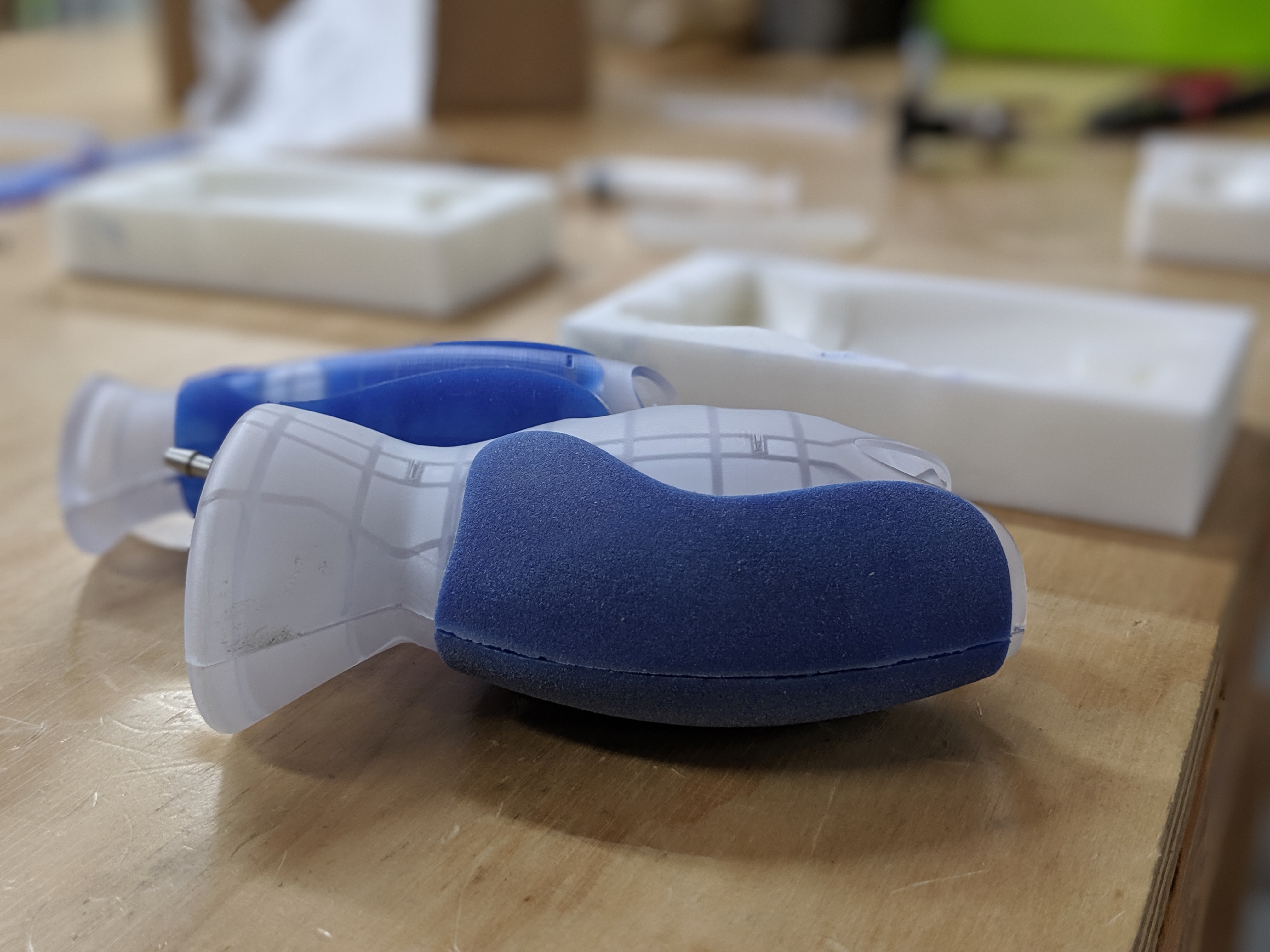
Refining the Form
Styles that were found to be more successful were refined in the mock-up stages. These form studies were sculpted from low cost foam and updated based on user feedback & testing.
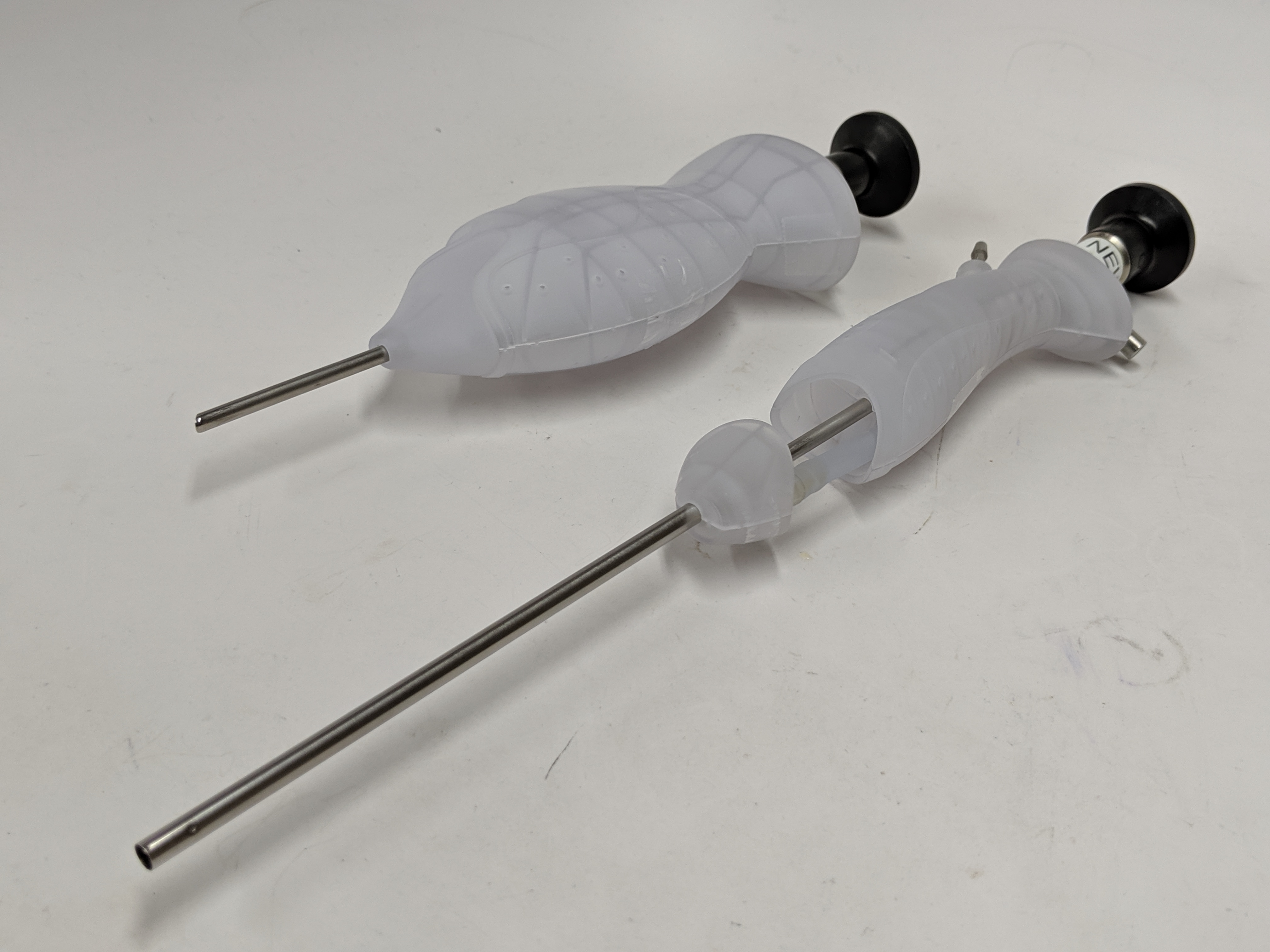
Two grip styles in particular were found to be best for addressing fatigue. At this point, a decision was made to include both styles into the prototype and production stages. These examples were the 1st and 4th concepts of the 8 presented.
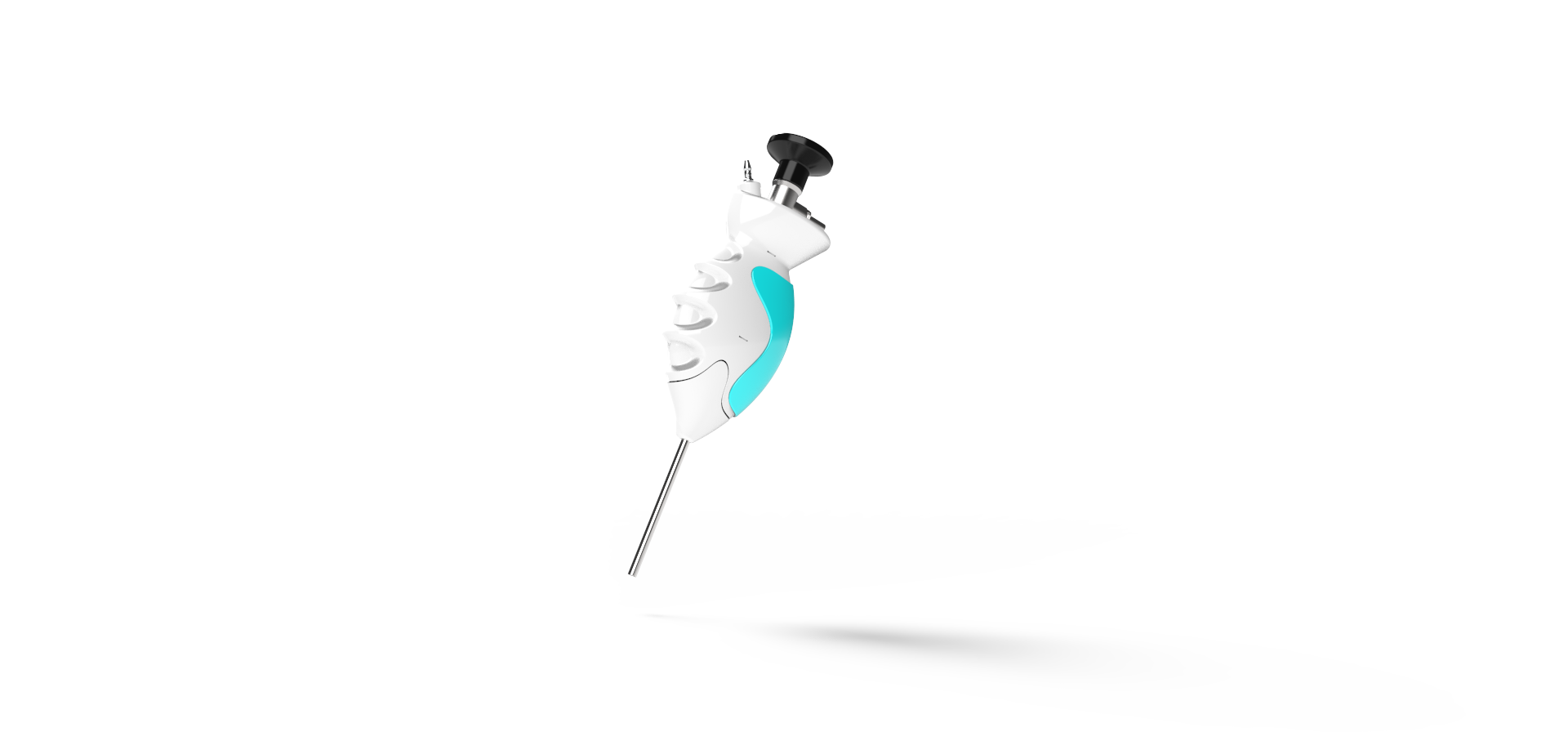
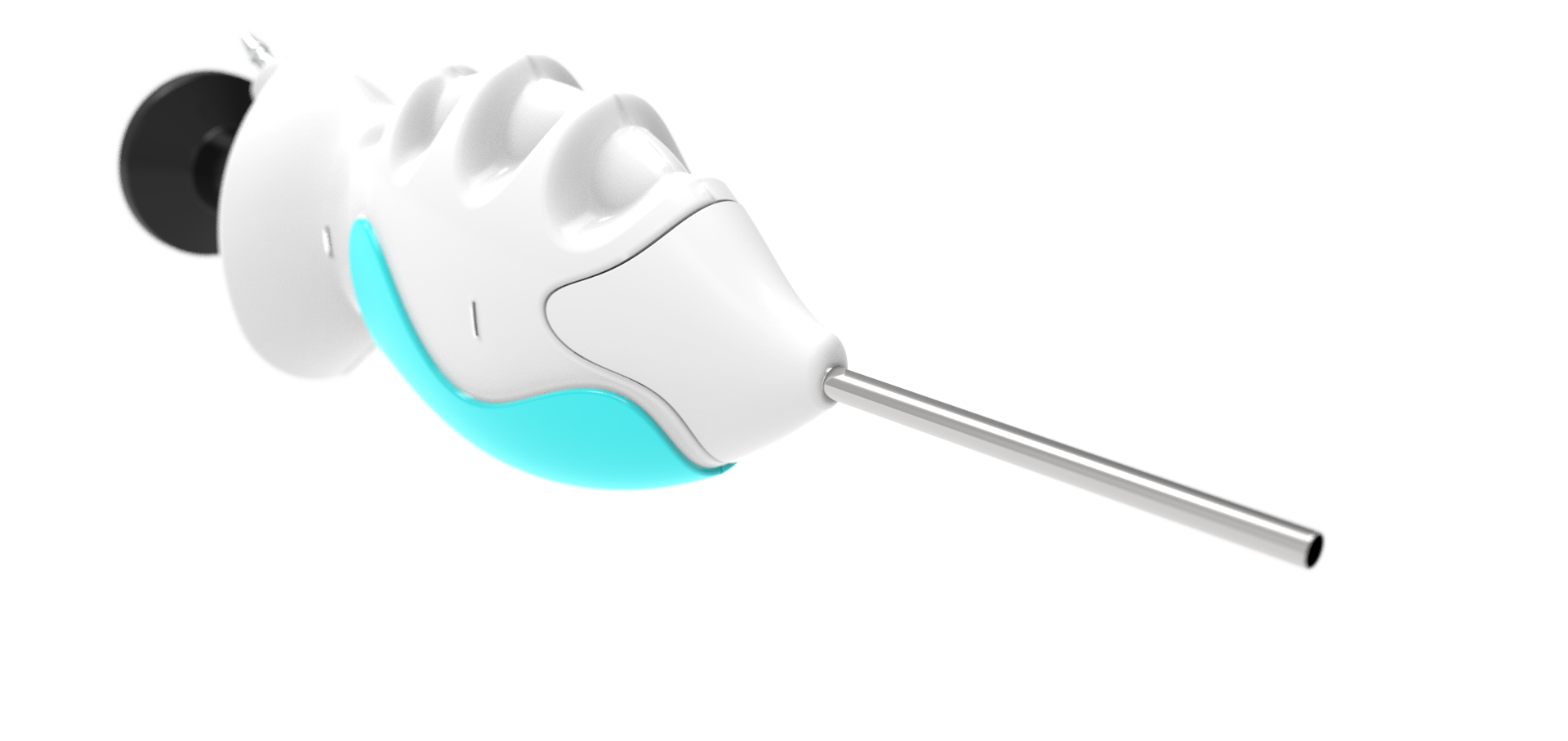
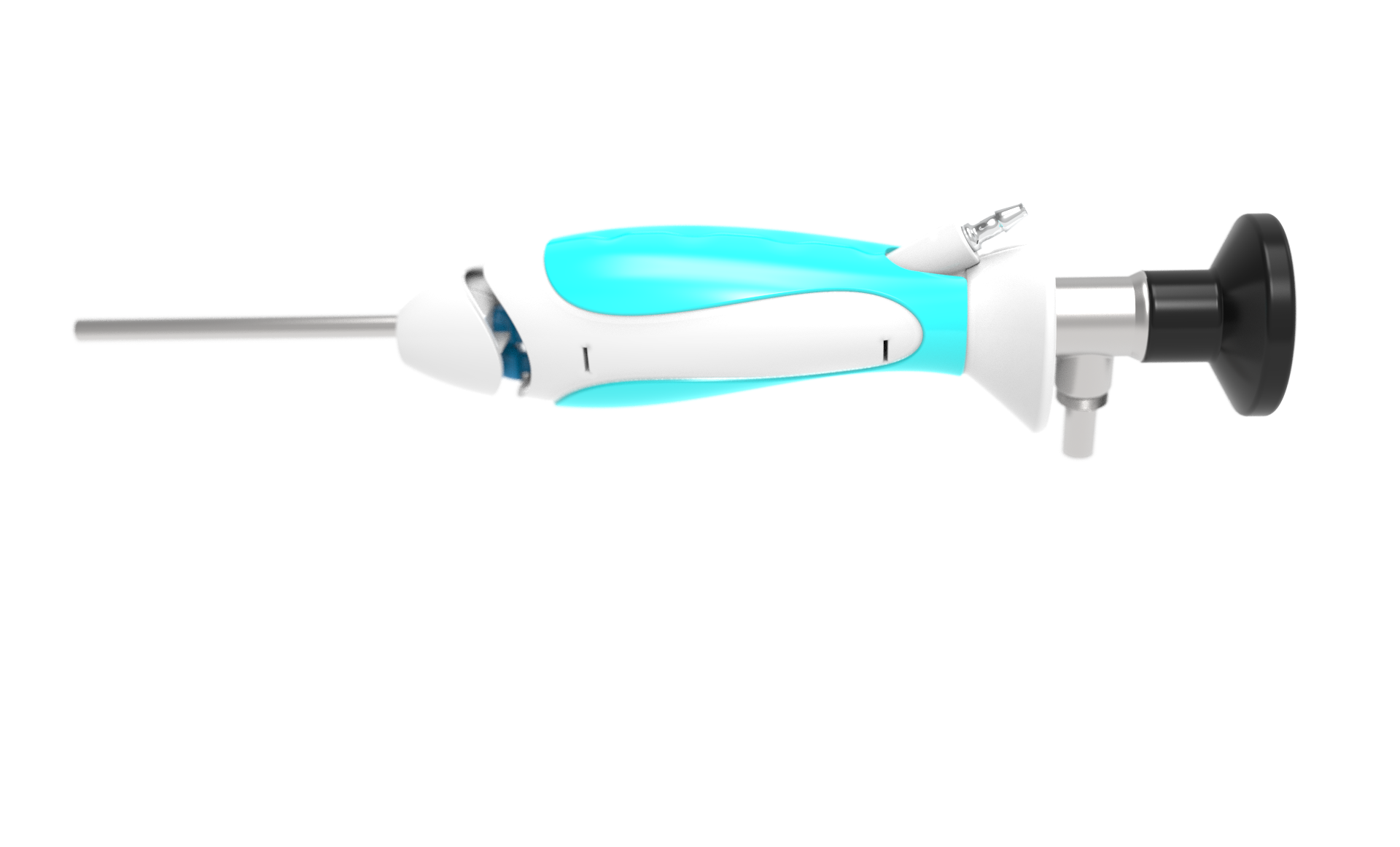
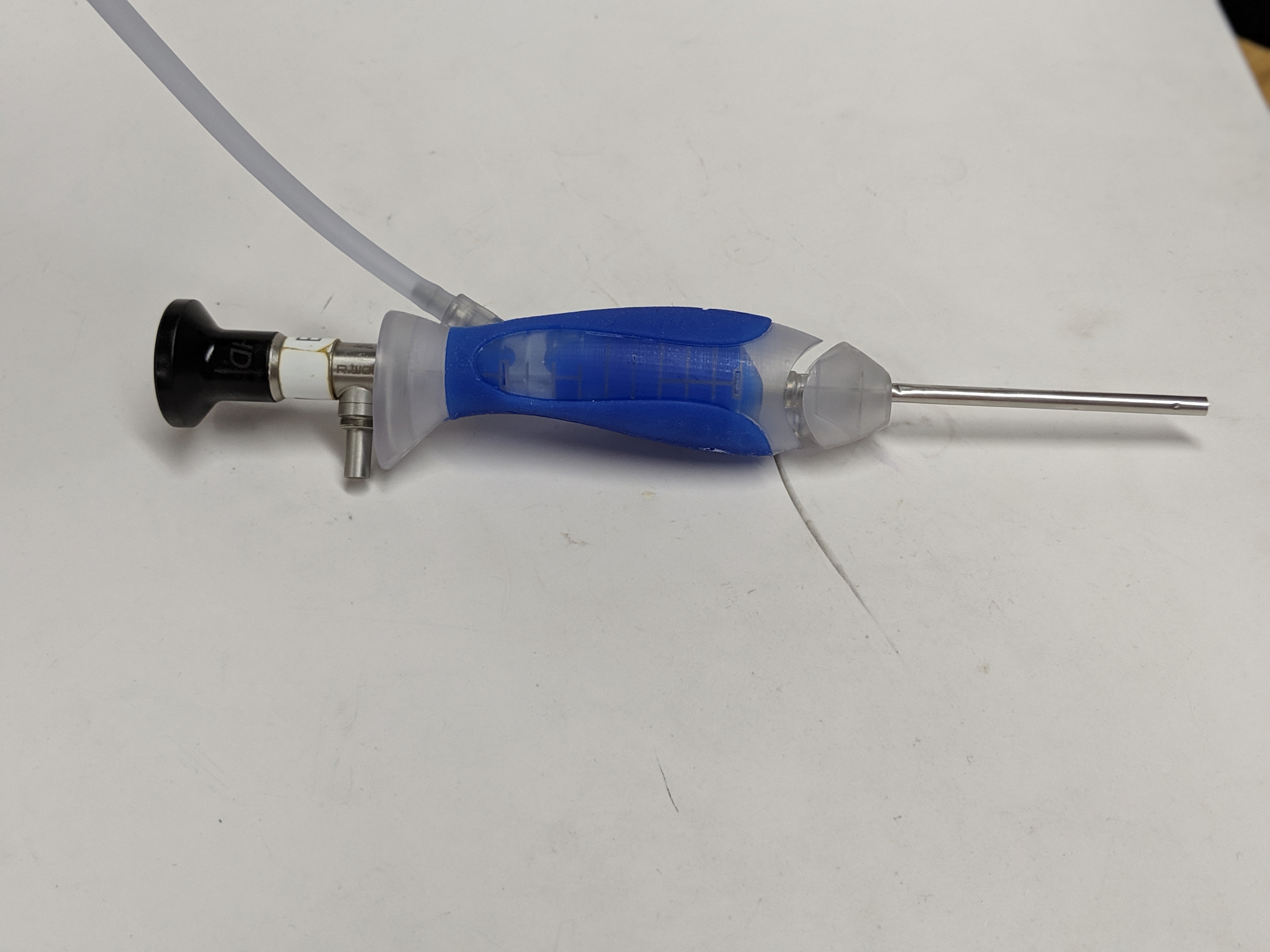
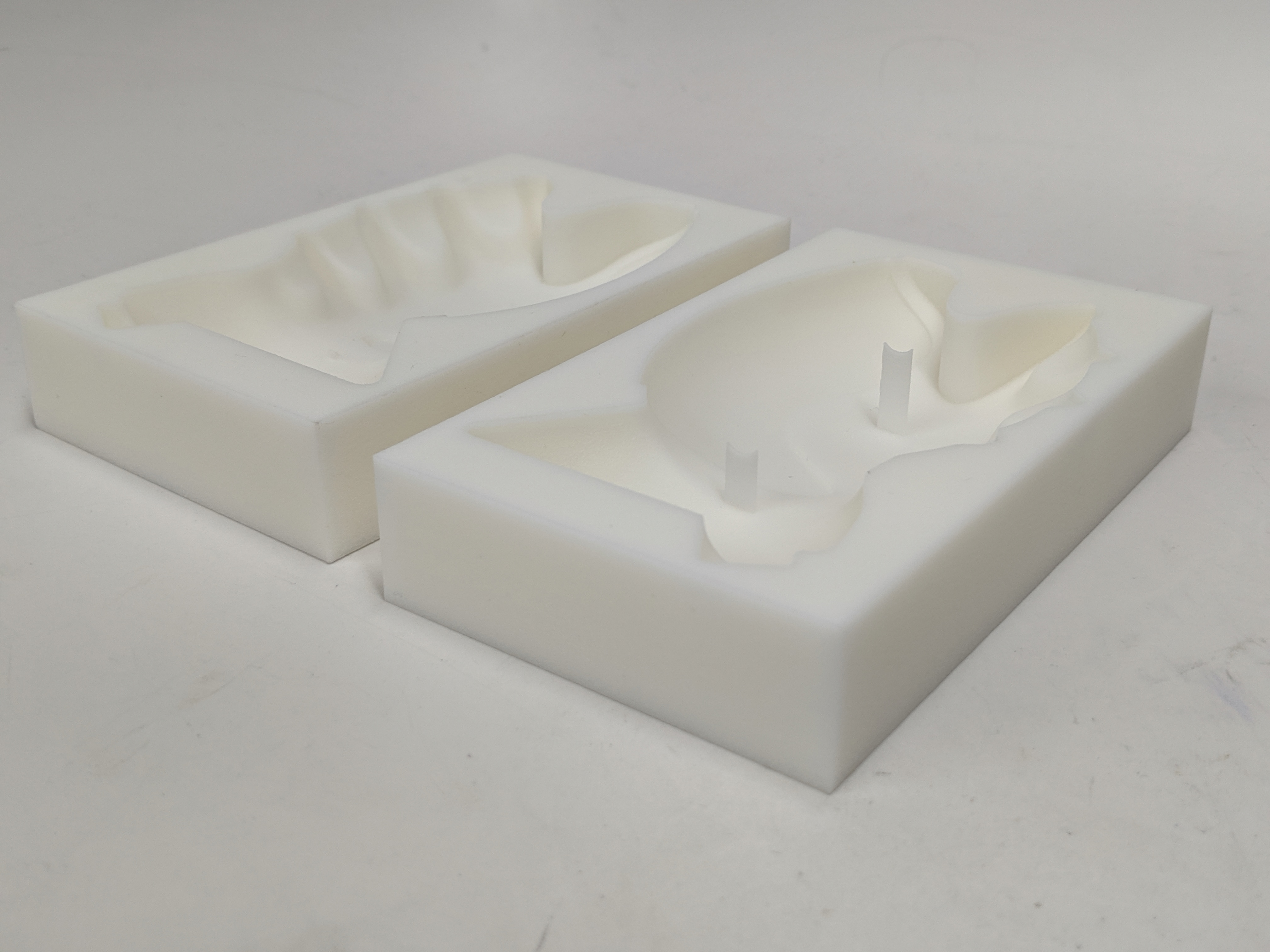
Grip 1 Assembly
The finalized mock-up samples were translated into 1:1 digital copies for further development.
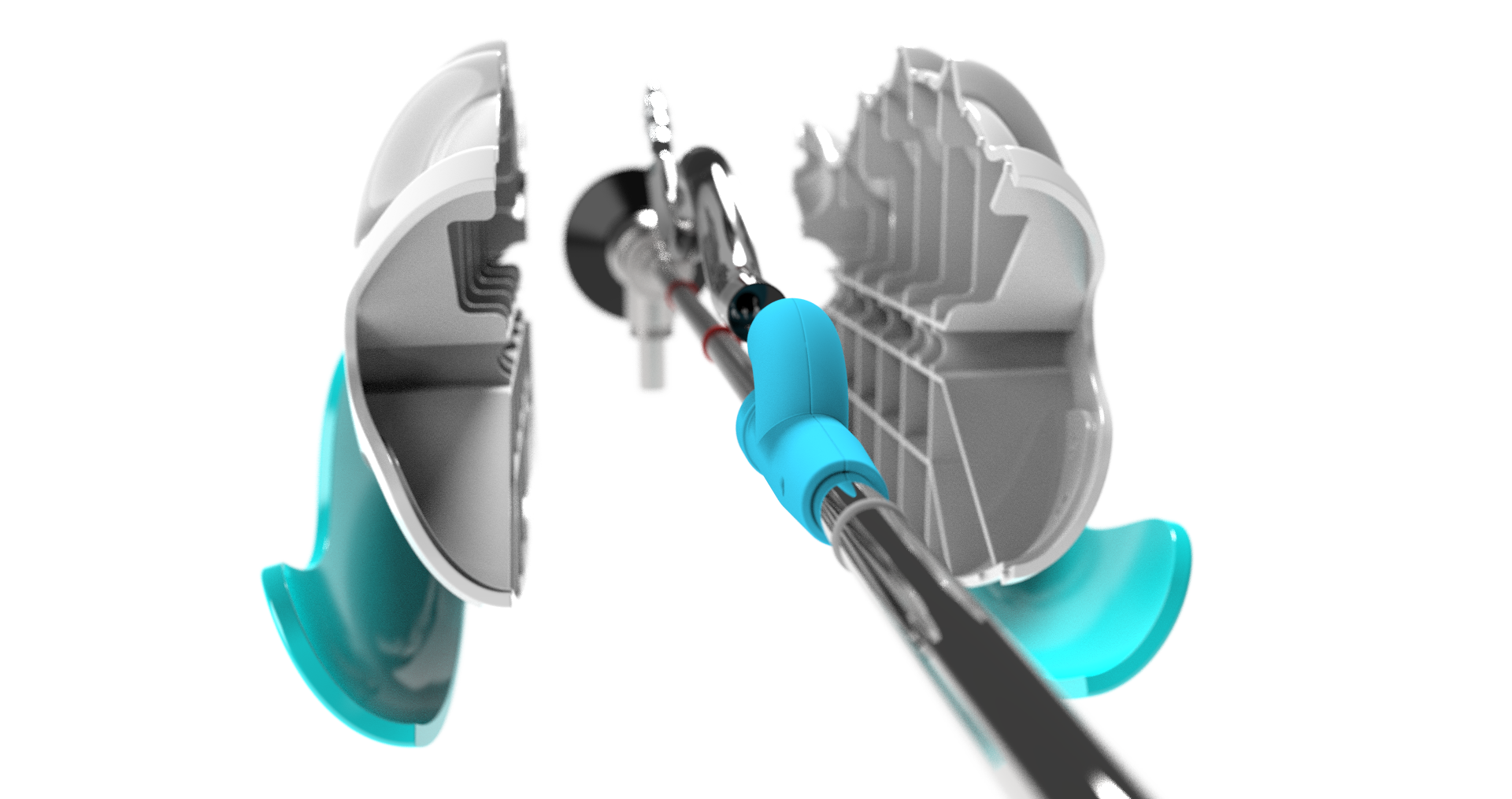
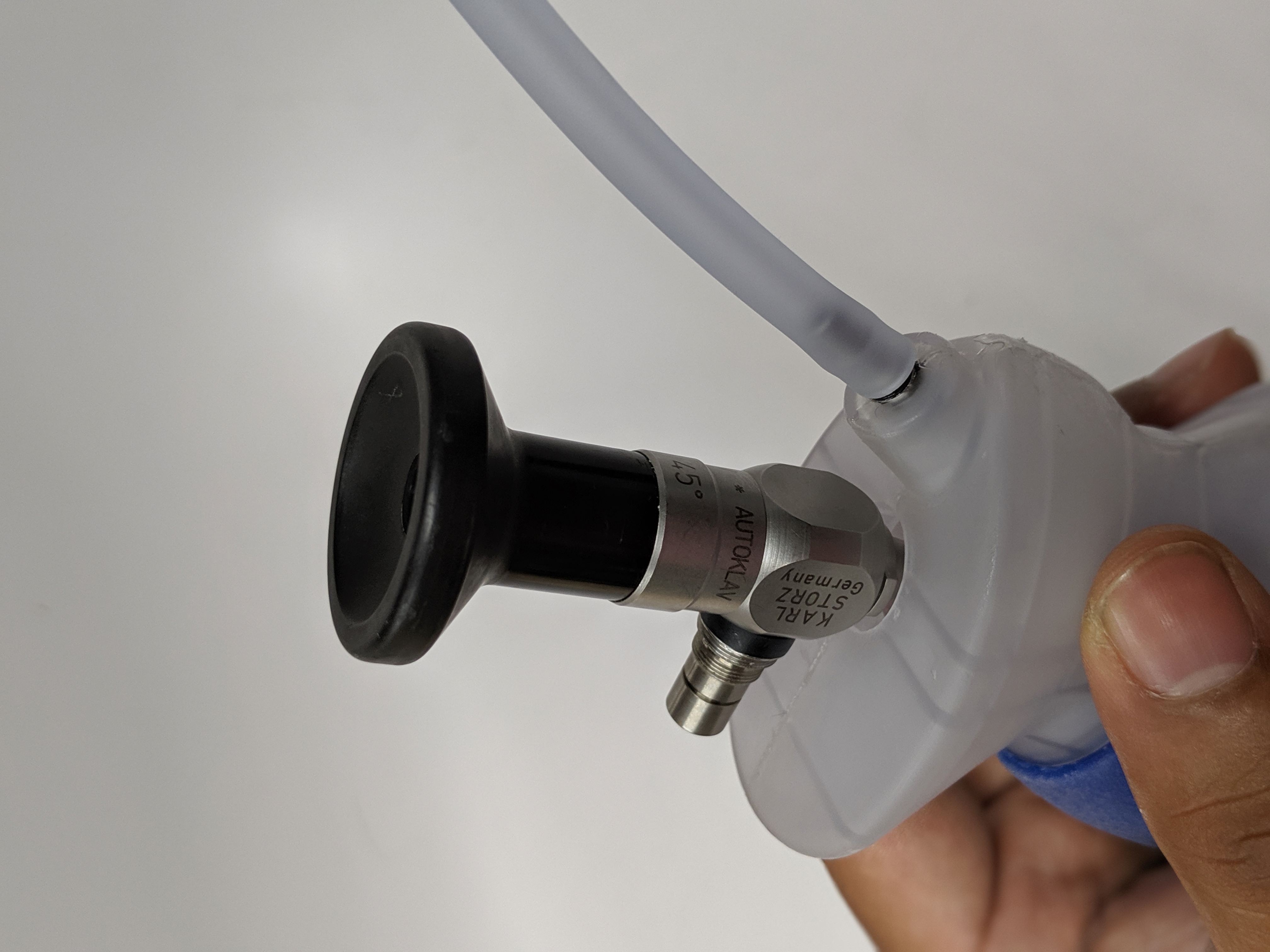
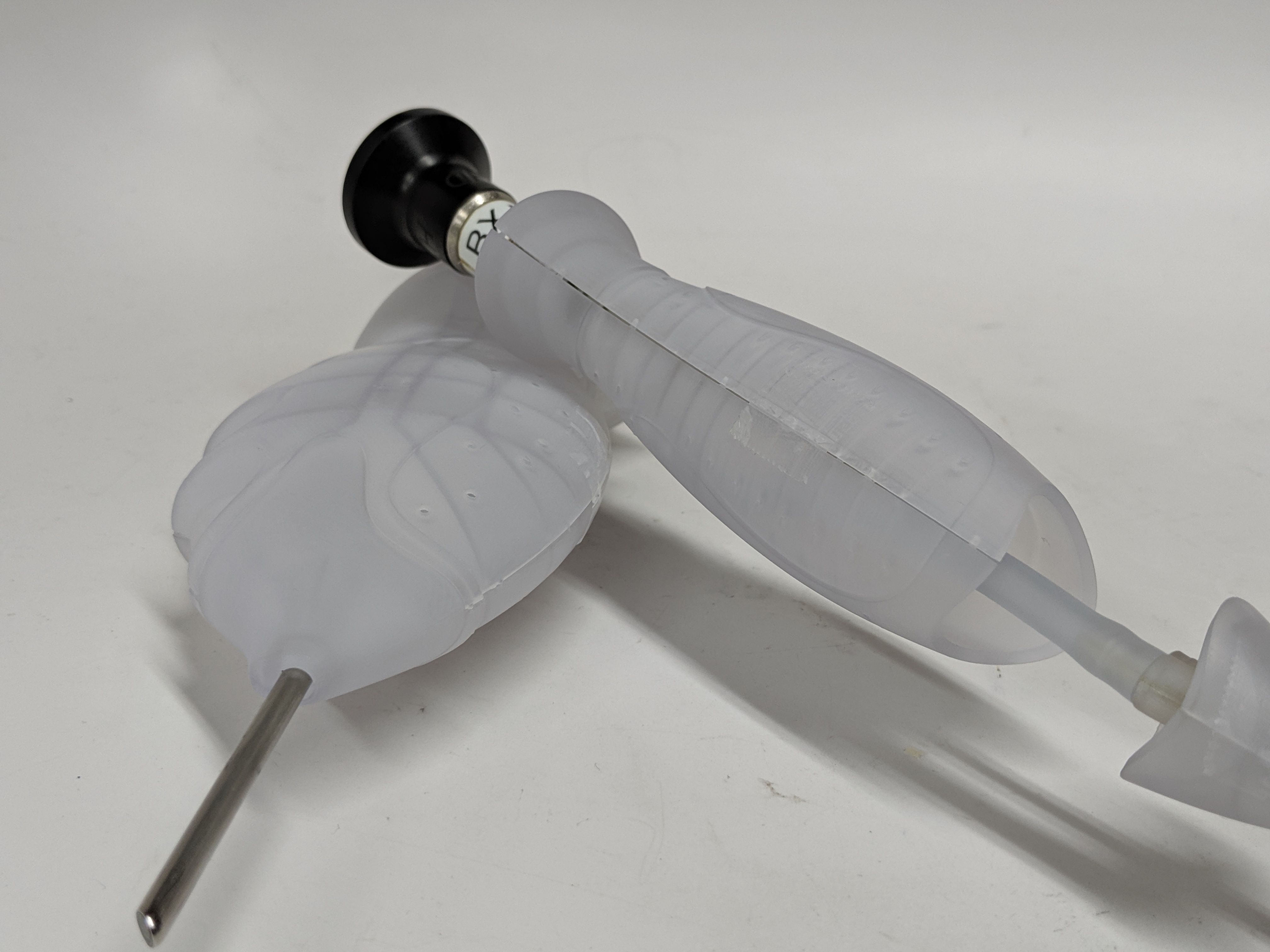
Ultimately a ‘clam shell’ design was chosen to house the internal assembly required for irrigation and suction of medical solutions.
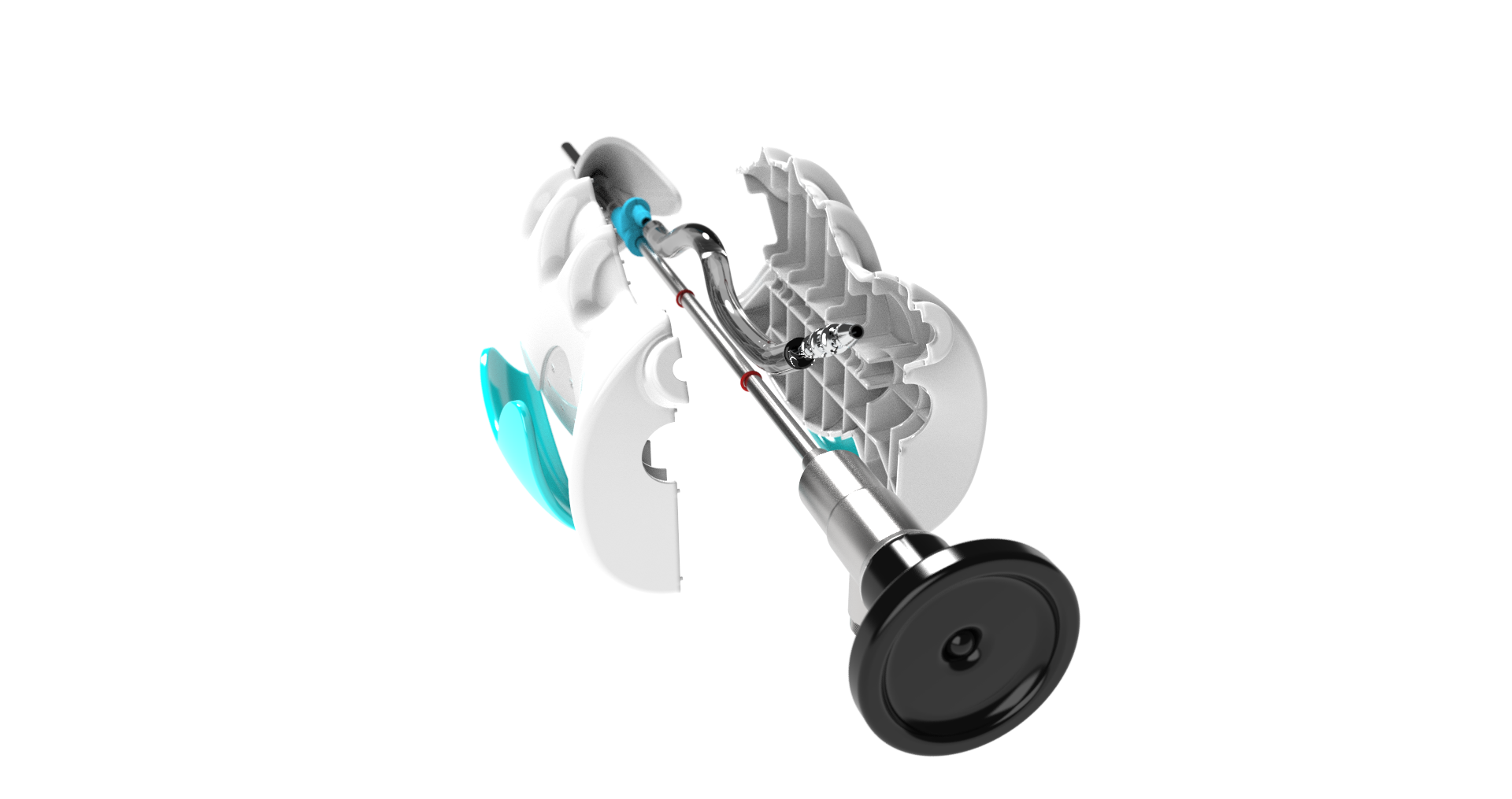
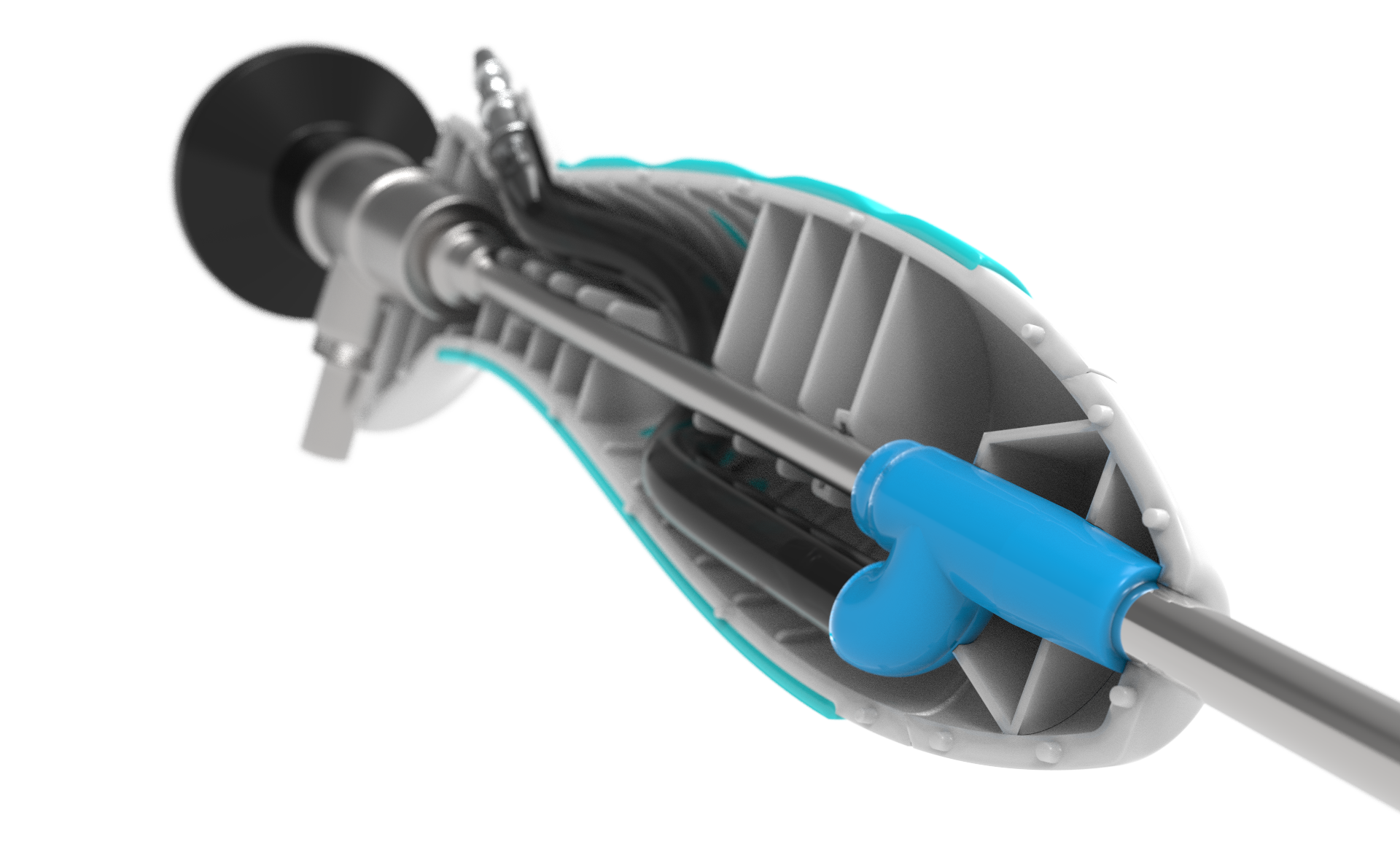
IGrip 1 Internal Structures
A Look Inside
Each hand piece used the same internal sub-assemblies in order to reduce production costs. Irrigation lines were custom to each sample.
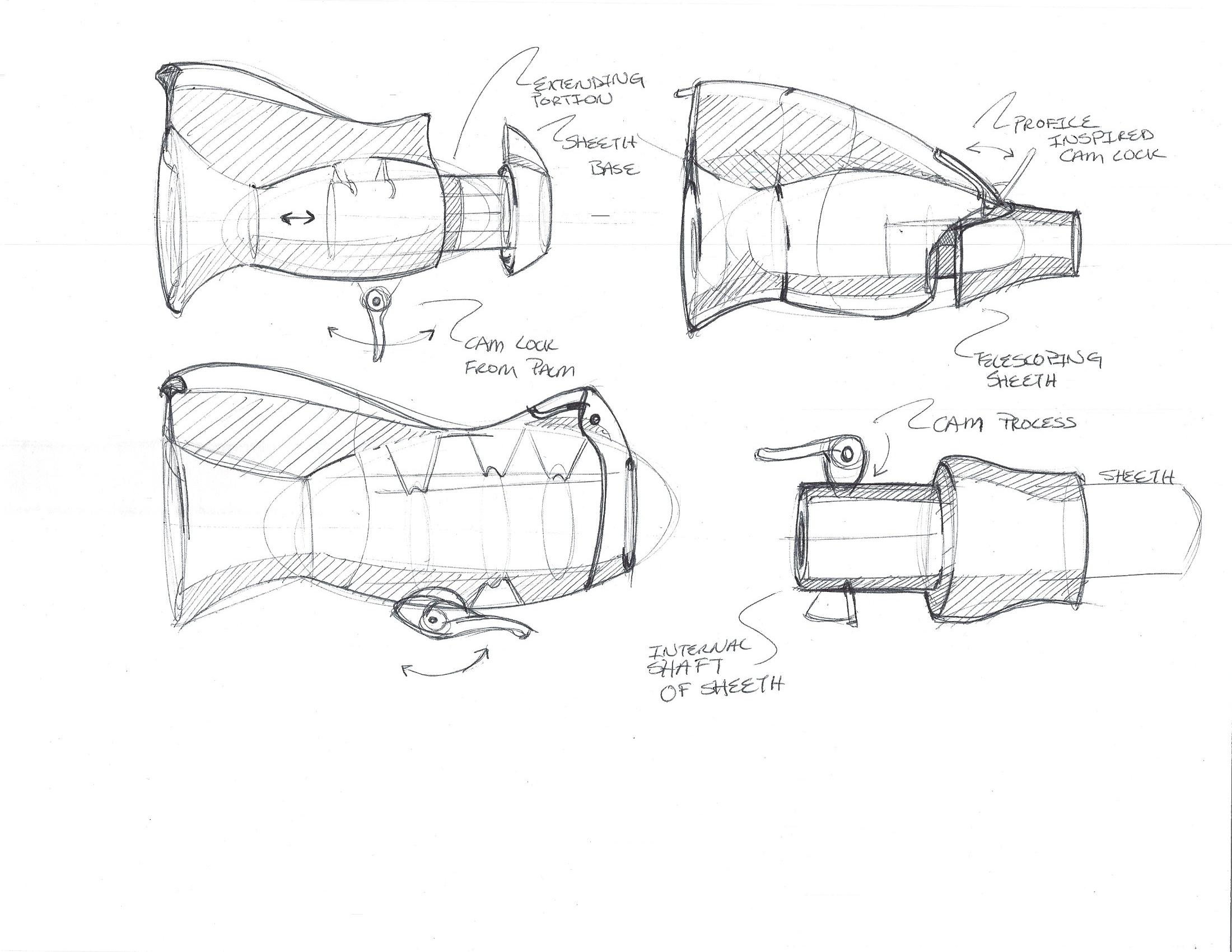
The internal assembly included a sheathe, valve assembly, irrigation line, and optics.
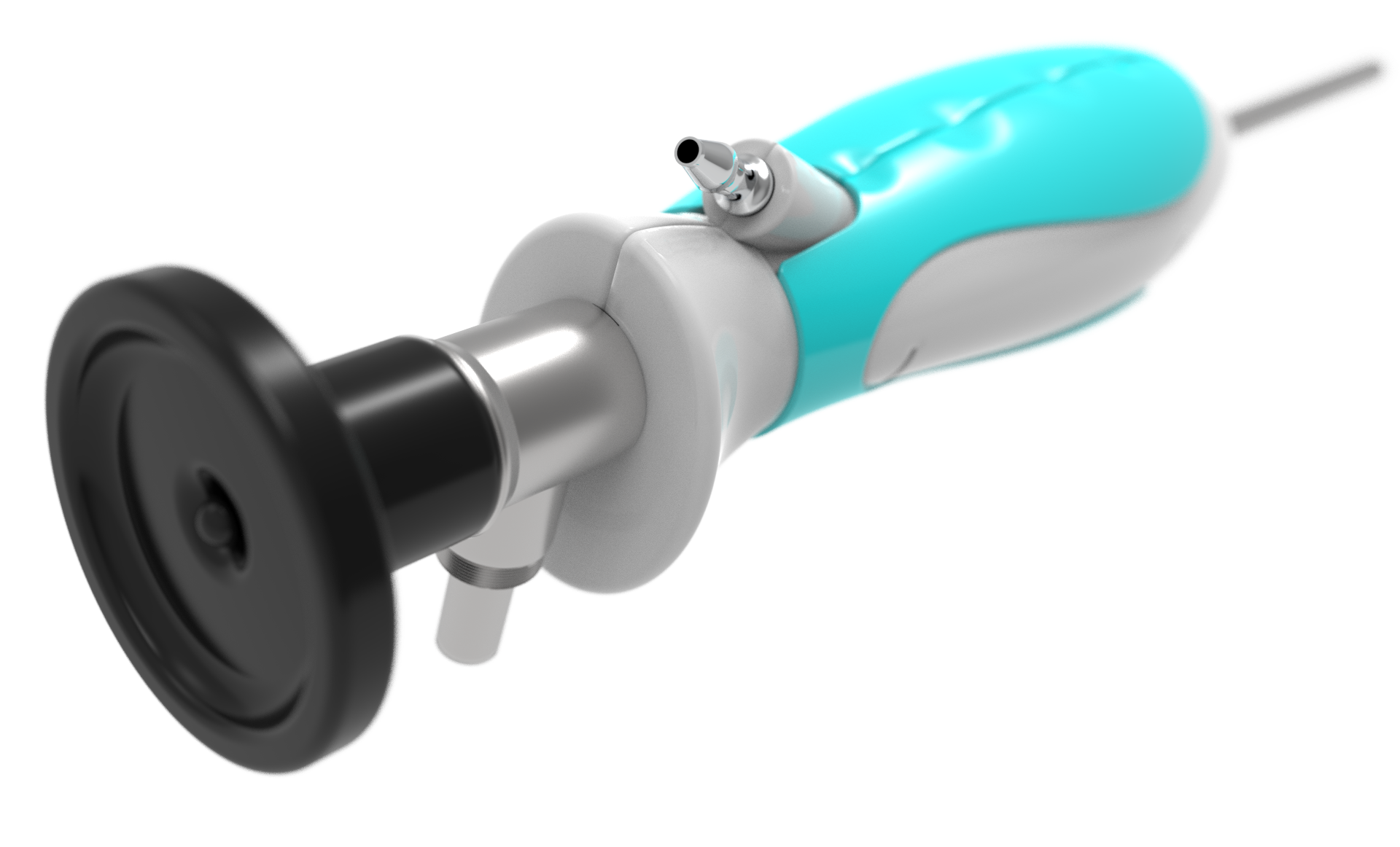
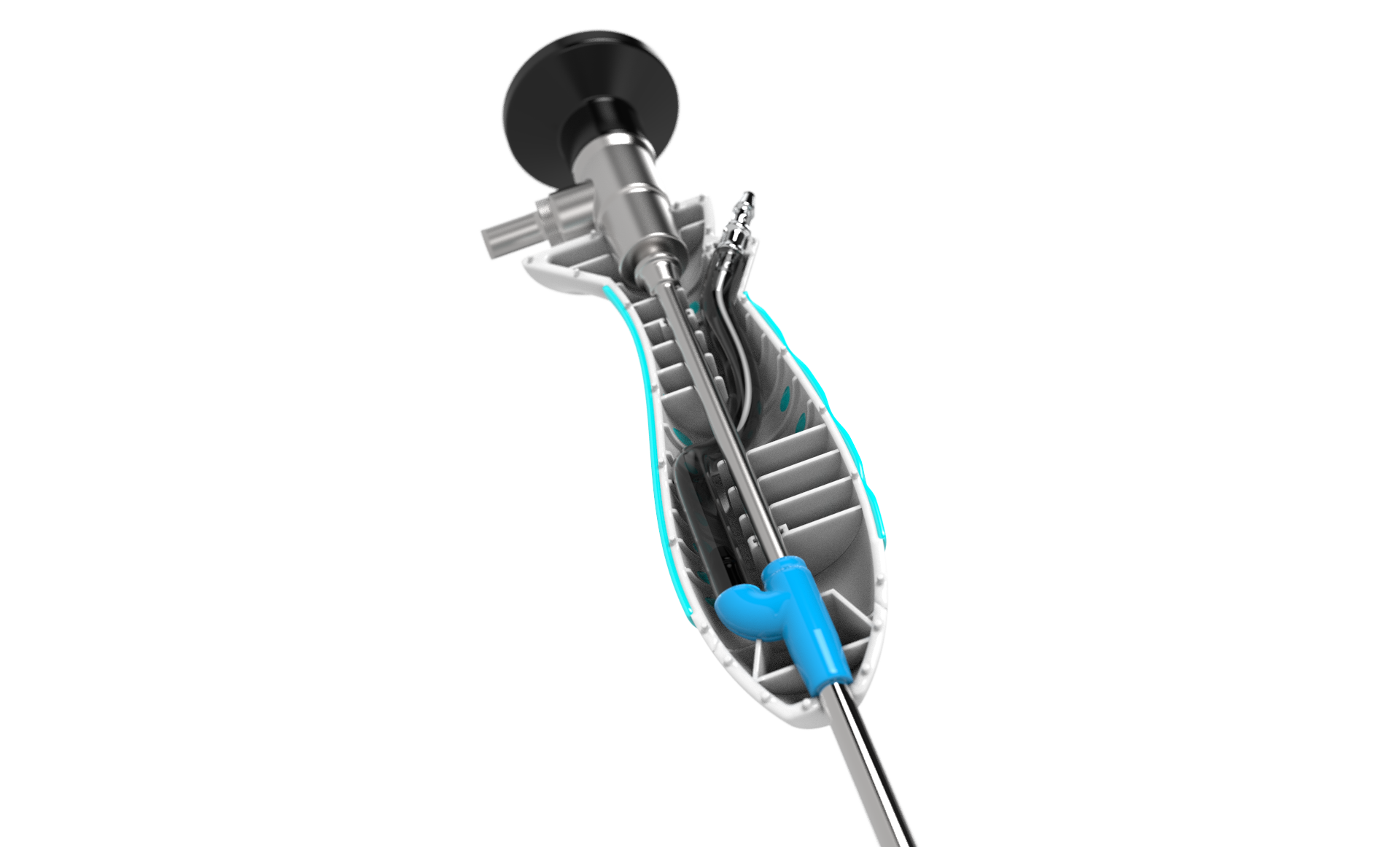
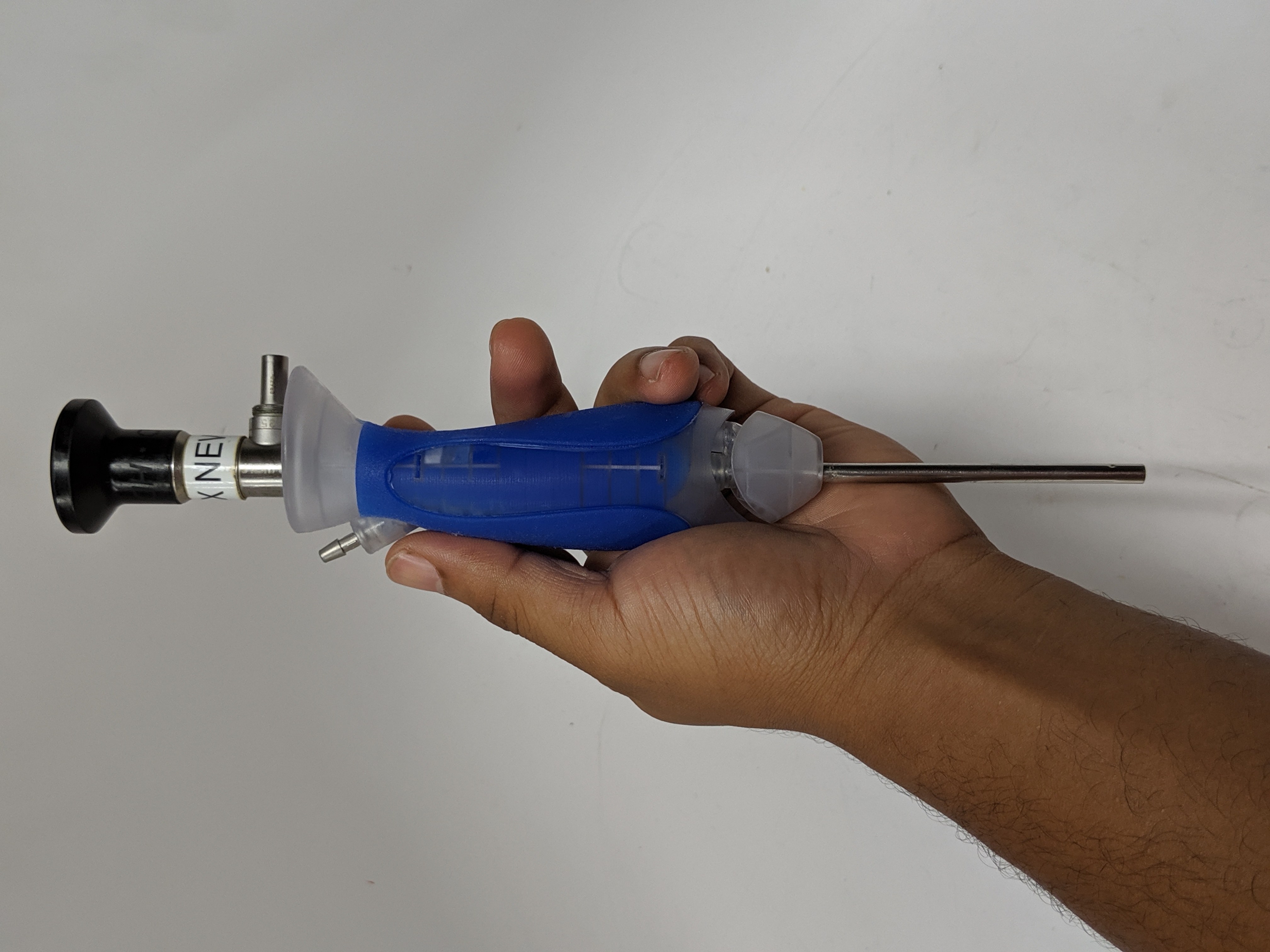
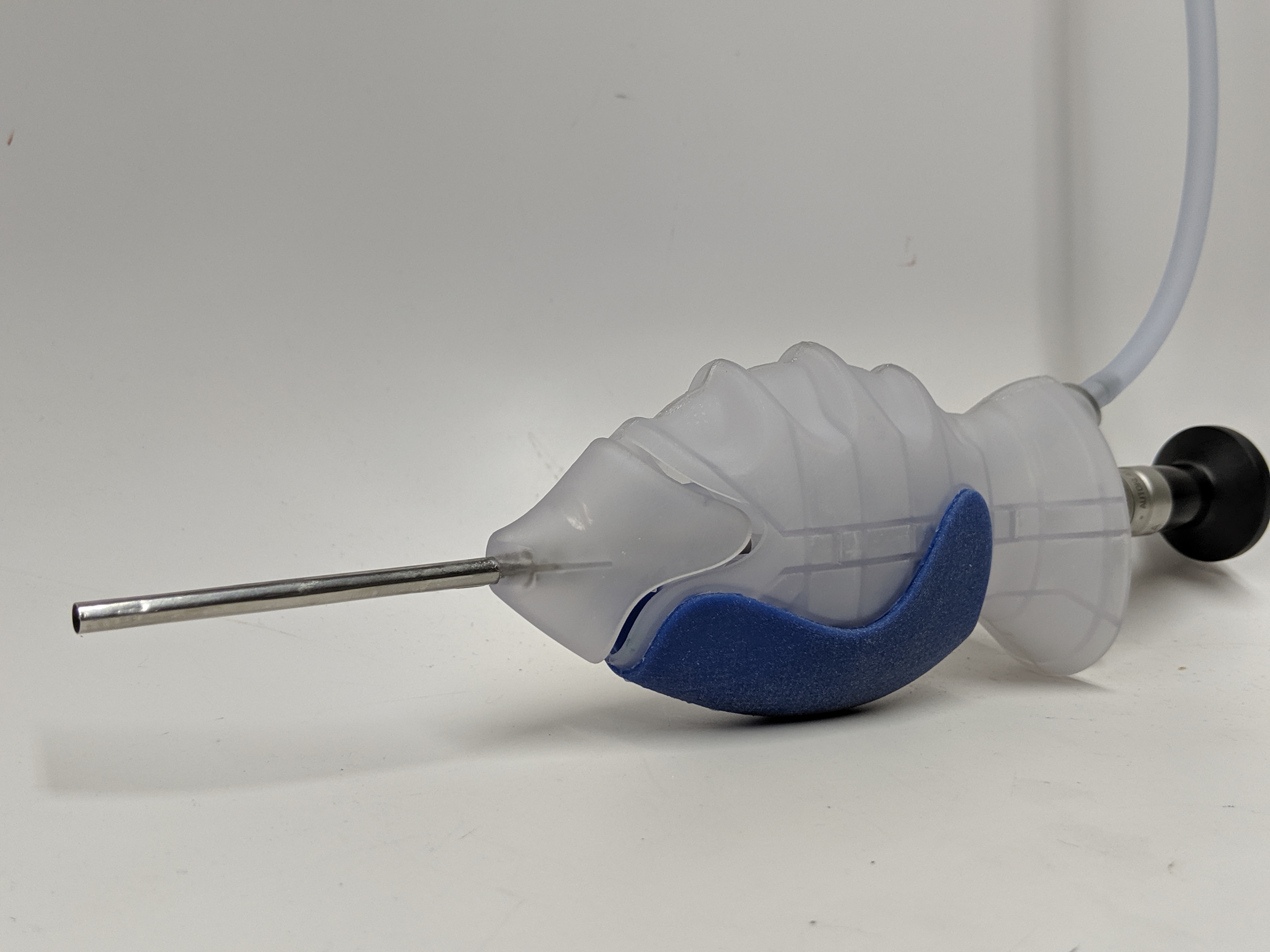
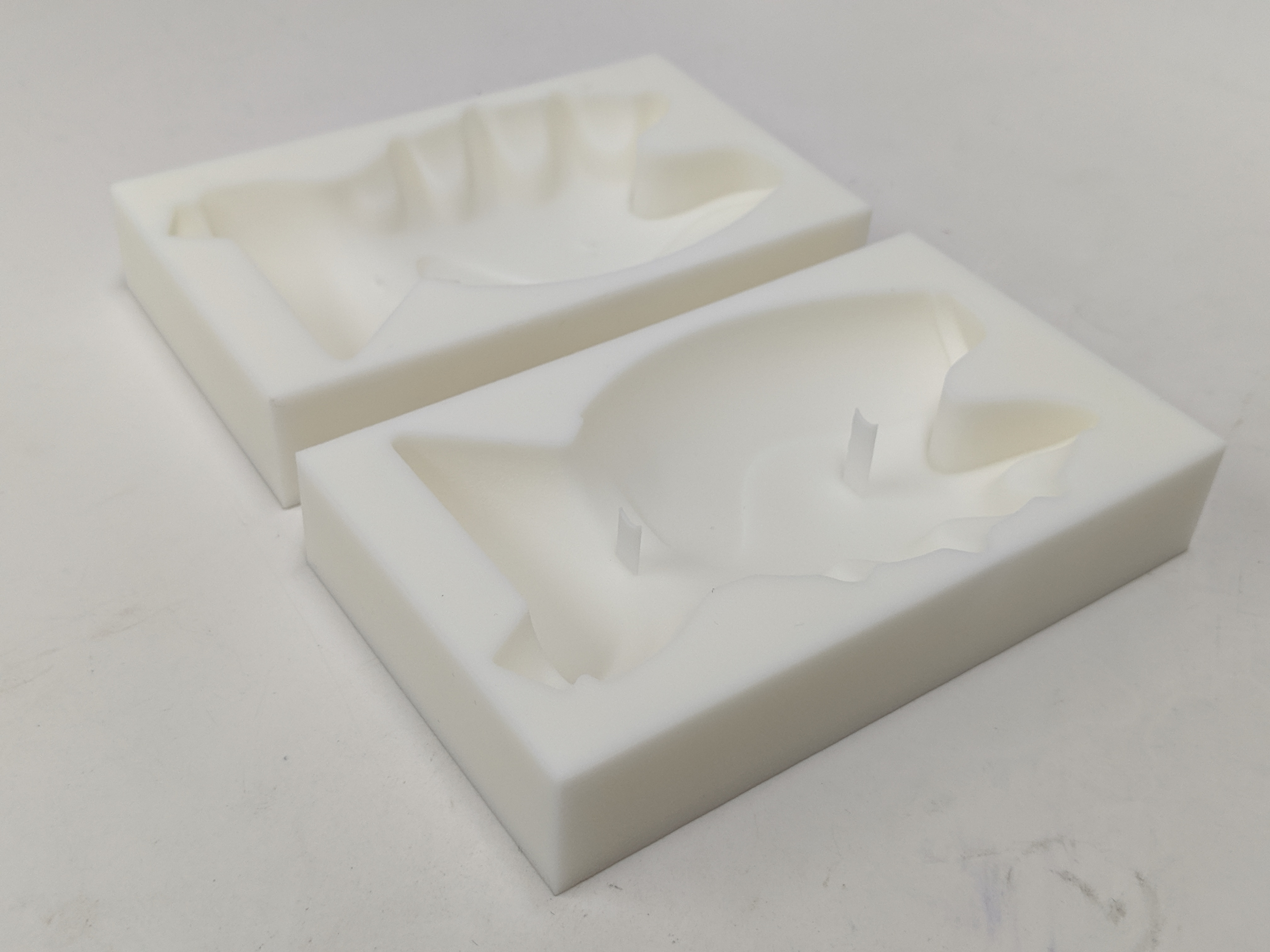
Grip 4 Assembly
This assembly was chosen for its ability to address a different demographic of users with smaller hands.
Though the geometry is different from the Grip 1 assembly, its ergonomics remained the same.
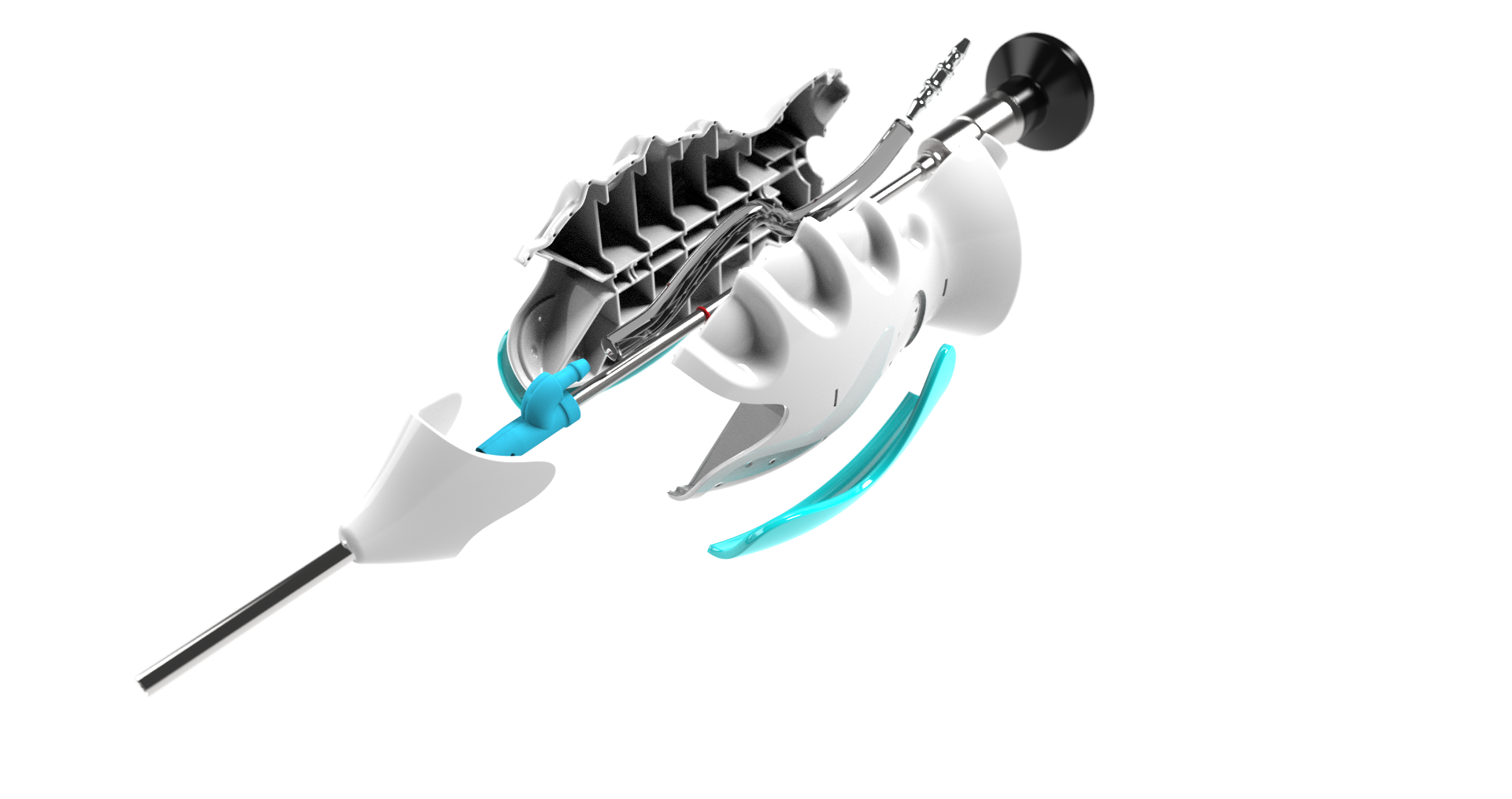
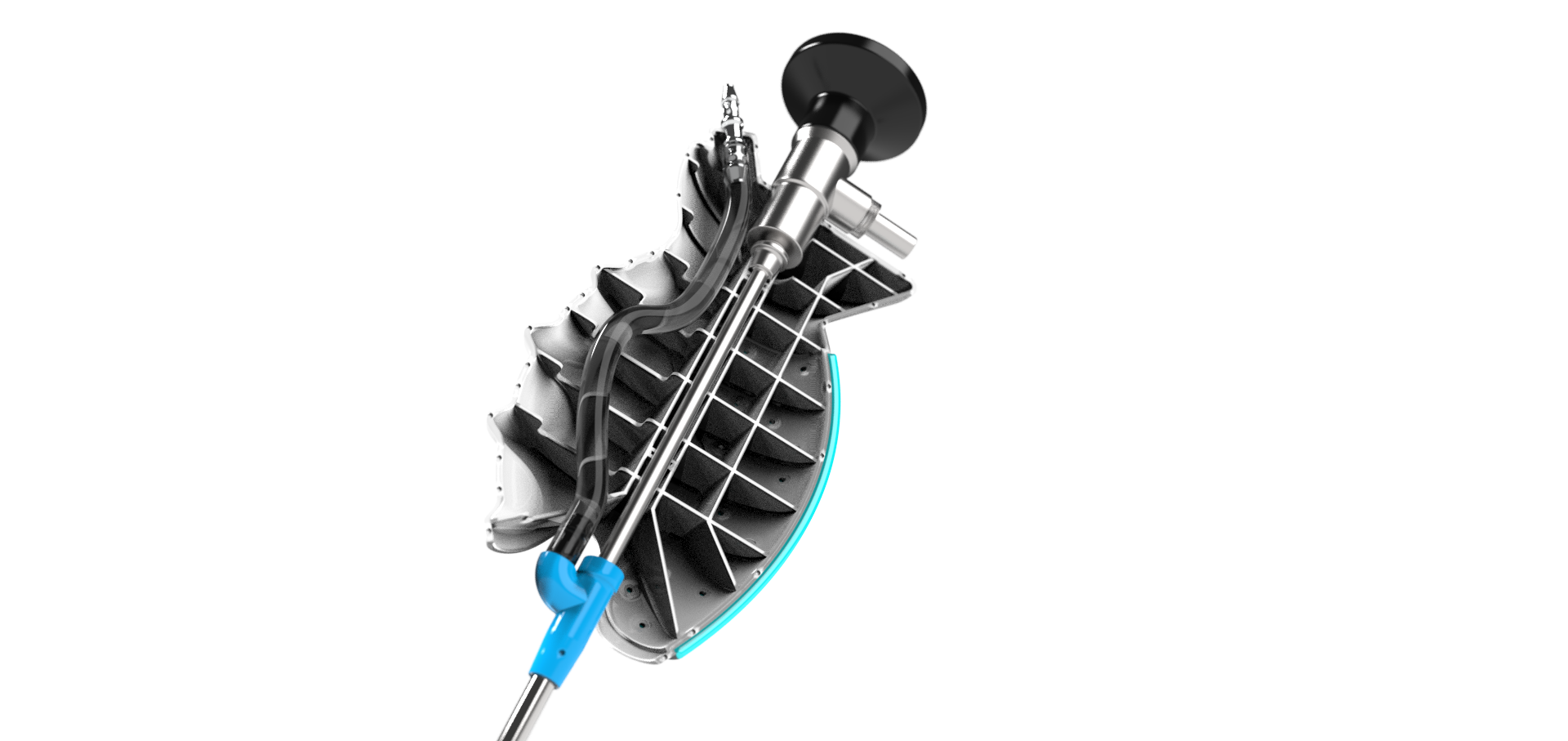
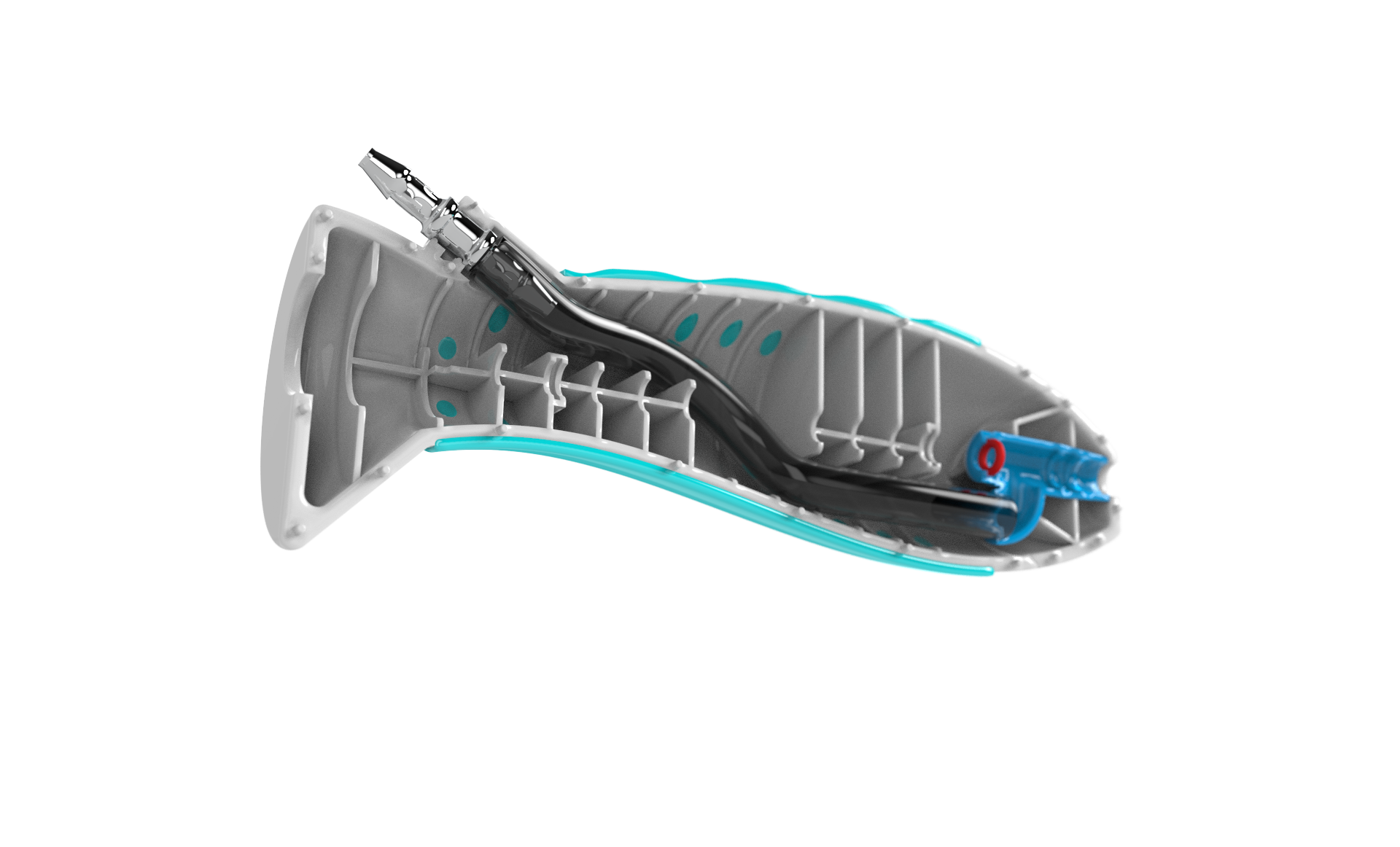
Grip 4 Internal Structures
A Look Inside
Each hand piece used the same internal sub-assemblies in order to reduce production costs. Irrigation lines were custom to each sample.
The irrigation line for the Grip 4 design was more challenging due to its reduced volume. A 3 dimensional path was created to address this constraint.
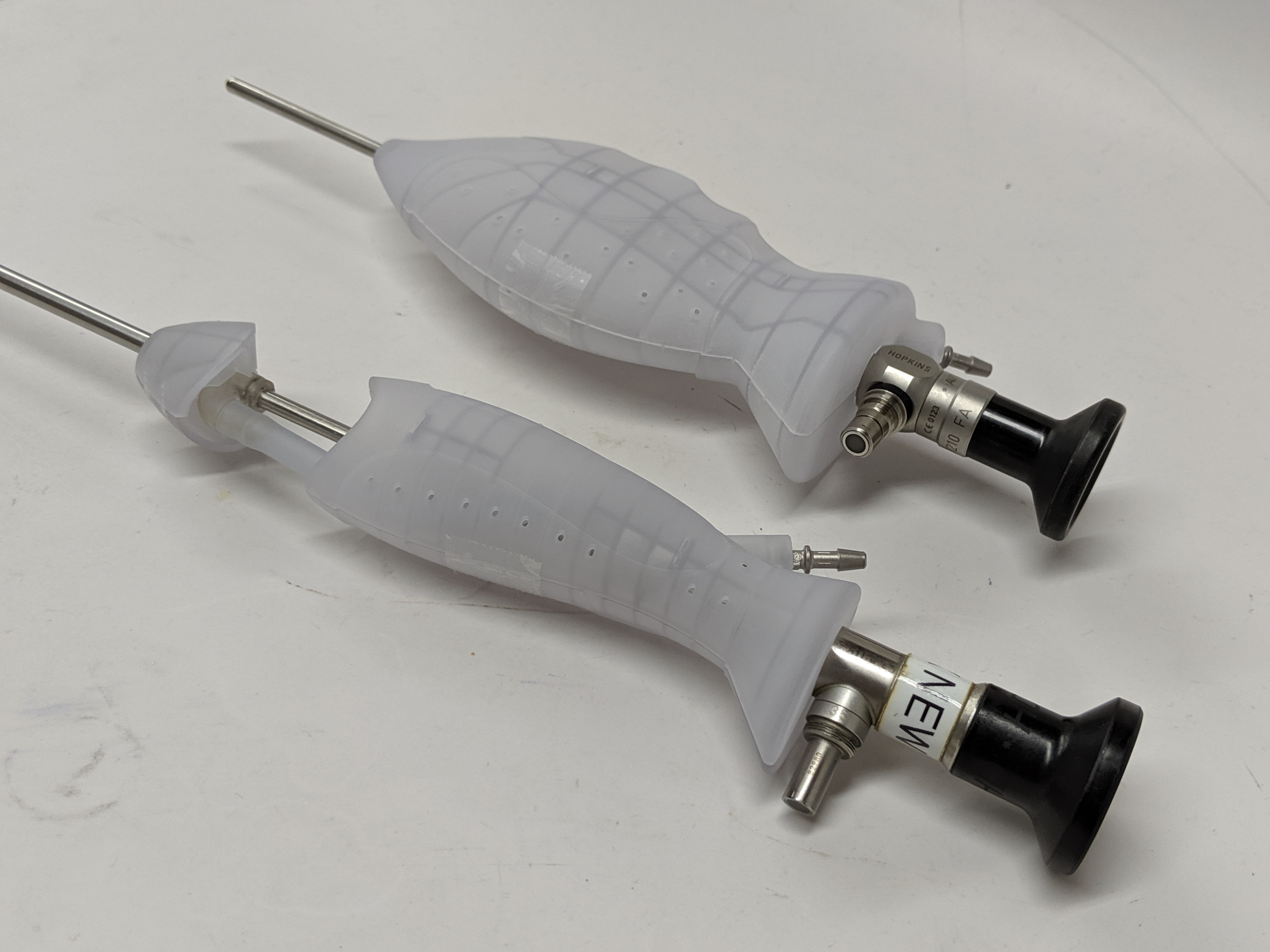
Final Assembly
Prototype development and testing for Grips 1 and 4